|
Zhenyu Wu received his B.Eng. degree from the Beijing University of Posts and Telecommunications (BUPT) in 2021. He is currently a graduate student at the School of Automation, Beijing University of Posts and Telecommunications, China. His research interests include robotic vision, intelligent robotics, and remote sensing image object detection. He serves as a regular reviewer member for Pattern Recognition Letters, ICME and ICIP. |
|
|
|
|
|
|
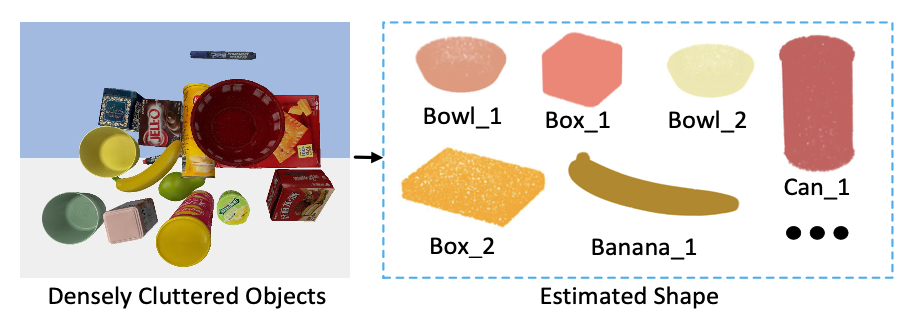
Zhenyu Wu, Ziwei Wang, Jiwen Lu, Haibin Yan IEEE International Conference on Robotics and Automation (ICRA), 2023. [PDF] [Code] We propose a category-level shape estimation method for densely cluttered objects, which addresses the challenges of large object segmentation errors and inaccurate shape recovery on unseen instances. |
|
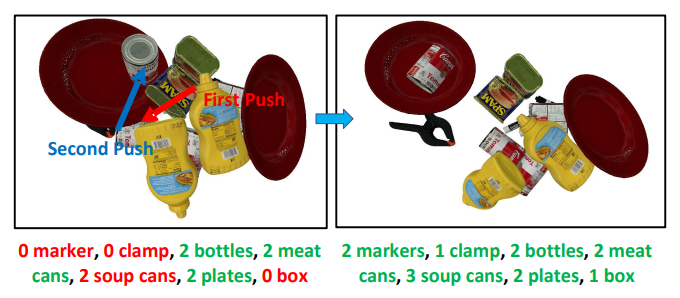
Zhenyu Wu*, Ziwei Wang*, Zibu Wei, Yi Wei, Haibin Yan IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022. [PDF] [Demo] [Code] We propose an interactive exploration framework called Smart Explorer for recognizing all objects in dense clutters. |
|
|
|
|
|
|